Nous vous accompagnons quelle que soit la taille de votre structure dans votre démarche d’innovation et de R&D. Nous sommes à vos côtés dans la mise en place d’une chaine complète de valorisation des besoins et des savoirs.
TIBTOP (Start up)
Objectif
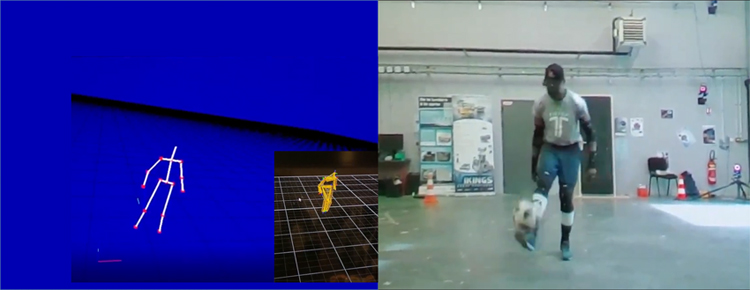
• Concevoir un système de localisation pour les joueurs de football basé sur un protège-tibia connecté
Réalisations
• Optimisation basée sur le GPS
• Évaluation des performances avec nos 20 caméras Vicon en intérieur ainsi qu’un sac à dos équipé d’un GPS RTK
• Évaluations et qualification de technologies de localisation Ultra WideBand (UWB) en intérieur et extérieur
Compétences mises en œuvre
Développement électronique/mécanique/logiciel, localisation, filtrage, expérimentation, analyse, optimisation.
Total Projet ARGOS
Objectifs
• Concevoir une plateforme robotique capable d'inspecter de façon autonome une plateforme pétrolière
• Surveiller les états de divers manomètres, vannes et fuites de gaz
Réalisations
• Conception complète (mécanique et électrique) des plateformes robotiques
• Localisation légère en temps réel centimétrique basée sur des données LiDAR
• Traitement de l’information basé sur de l’apprentissage
Compétences mises en œuvre
Développement électronique/mécanique/logiciel, localisation Lidar, perception vision, intégration système.
Safran Electronics et Defense
Objectif
• Concevoir un algorithme de perception et de contrôle pour donner la capacité à un robot à chenille de traverser les escaliers de manière autonome (monter et descendre)
Réalisations
• Détection robuste des escaliers (depuis le haut vers le bas des marches)
• Contrôle visuel-inertiel du robot dans l’escalier
• Asservissement des flippers innovants pour maximiser l’adhérence du robot
Compétences mises en œuvre
Développement logiciel, Perception Vision Stéréo, Localisation, planification, contrôle.
Transdev STA
Objectifs
• Concevoir un algorithme de localisation robuste et précis pour véhicule autonome
• L’algorithme doit être capable de s’exécuter sur CPU et GPU avec des accès concurrents
Réalisations
• Localisation légère en temps réel avec données LiDAR
• Exécution de manière hybride et distribution sur CPU et GPU
• Utilisation commerciale par Transdev dans ses navettes de transports publics autonomes
Compétences mises en œuvre
Développement logiciel CPU/GPU, Localisation Lidar, filtrage, expérimentation, intégration.
CARNOT ESP
Objectifs
• Concevoir un système de surveillance de la qualité de l’air en plein air basé sur des capteurs de références dans les tests de pollutions de véhicules
• Capacité de réaliser des mesures sur des zones sans systèmes de surveillance de la pollution
Réalisations
• Système de monitoring autonome
• Traitement des données et visualisation
• Mesures performantes au plus proche de la route
Compétences mises en œuvre
Développement logiciel/mécanique/électronique, expérimentation, intégration, traitement de données.
Projet Interreg SURFAS
Objectif
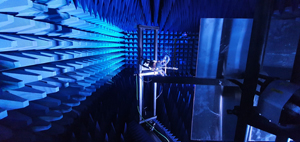
• Concevoir un système mécanique capable de reproduire des diagrammes de Surface équivalente radar en émission et réception pour des antennes en émission dans une chambre full anéchoïque existante
Réalisations
• Un système de positionnement 6 degrés de libertés
• Un design optimisé pour la chambre full anéchoïque existante
• Un contrôle et retour en temps réel
Compétences mises en œuvre
CAO (Conception Assistée par Ordinateur), réalisation mécanique, intégration, tests, CEM
Ils nous font confiance
Evaluation des capteurs innovants LiDARs flash LEDDARTECH dans le domaine du véhicule autonome.